News • Magnetresonanztomographie
Hydraulik-Antrieb für den OP-Roboter der Zukunft
Roboter können den Arzt beim Aufspüren und Behandeln von Tumoren unterstützen, indem sie etwa eine feine Sonde an der richtigen Stelle positionieren. Damit die Robotik bildgebende Verfahren wie die Magnetresonanztomographie nicht stört, haben IPA-Ingenieure eine neue Antriebstechnik entwickelt.
Tumortherapie ohne Risiken und Nebenwirkungen? Noch scheint dies undenkbar. Doch in den Laboren arbeiten Wissenschaftler bereits an Lösungen für die Medizin der Zukunft: "Eines der großen Ziele der Forschung ist es, Technologien für minimalinvasive Eingriffe zu entwickeln, mit denen sich Tumore so genau und effizient behandeln lassen, dass kein gesundes Gewebe zerstört wird", erklärt Johannes Horsch von der Projektgruppe Automatisierung in der Medizin und Biotechnologie PAMB des Fraunhofer IPA. Zusammen mit seinem Team arbeitet der Ingenieur an Robotern, mit deren Hilfe ein Operateur eine feine Sonde exakt positionieren, eine Probe nehmen oder das Tumorgewebe thermisch behandeln kann.
Eine solche Sonde genau an die gewünschte Stelle zu bringen, erfordert handwerkliches Geschick und viel Erfahrung: Wenn der Arzt mit einer Nadel die winzige Sonde einführt, muss er sich mit Hilfe von Bildern orientieren, die die Position auf dem Bildschirm anzeigen. "Bisher werden zur Bildgebung meist röntgenbasierte Methoden eingesetzt. Diese haben jedoch den Nachteil, dass sie Weichgewebe, zum Beispiel Organe, nicht sehr gut darstellen. Außerdem führen sie sowohl beim Arzt wie auch beim Patienten zu einer erhöhten Belastung durch Röntgenstrahlung", erklärt Horsch. "Mehr Zukunftspotenzial hat daher die Magnetresonanztomographie."
Noch stoßen Mediziner, die mit Hilfe von MRT-Bildern eine Sonde zu einem Leber-, Lungenoder Darmtumor führen wollen, schnell an Grenzen: Die Röhre, in welcher der Patient oder die Patientin liegt, lässt dem Operateur kaum Bewegungsfreiheit. Um dieses Problem zu lösen, arbeiten verschiedene Forscherteams auf der ganzen Welt an Robotern, die beim Einführen der Nadel helfen sollen. "Das größte Problem ist die Antriebstechnik ", berichtet Horsch. "Die Motoren, wir sprechen von Aktoren, sollten keine ferromagnetischen oder elektrisch leitfähigen Materialien enthalten, da diese die MRT-Bildgebung stören können. Klassische Elektromotoren scheiden daher aus." Auch pneumatische Zylinder, die sich nur schwer steuern lassen, seien nicht geeignet.
3D-Druck
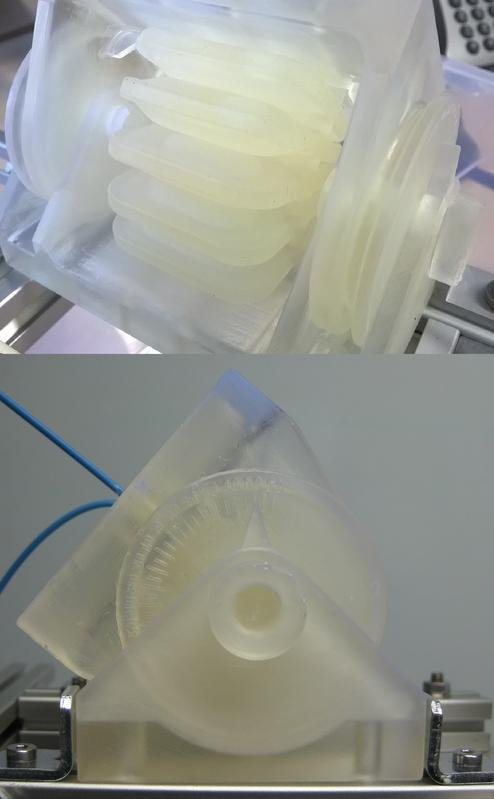
Die Lösung der IPA-Ingenieure: ein hydraulischer Roboter-Antrieb. Herzstück dieses Aktors sind mit 3D-Drucktechnik gefertigte Kunststoff-Bälge. Diese sehen aus wie eine kleine Ziehharmonika, die mit einer dünnen, mit Flüssigkeit gefüllten Leitung verbunden ist. Wird die Flüssigkeit unter Druck gesetzt, dehnt sich die Ziehharmonika aus oder biegt sich. Diese Biegung lässt sich nutzen, um einen Roboterarm, der beispielsweise eine Nadelsonde führt, zu bewegen. Durch Kombination von zwei hydraulischen Aktoren soll der Roboterarm in zwei Raumrichtungen genau gesteuert werden können. Dank eines Kraftrückkoppelungsmechanismus spürt der Chirurg, der den Roboterarm bewegt, wenn die Sonde auf einen Widerstand trifft.
"Die eigentliche Innovation besteht darin, dass die Aktoren keine Teile enthalten, welche die MRT-Aufnahmen stören", resümiert Horsch. Durch die Hydraulik lassen sich große Kräfte in einem kleinen Bauraum erzeugen. Damit sind die Platzprobleme innerhalb der MRT-Röhre gelöst. Man brauche zwar immer noch einen Motor, der den Druck in den Leitungen erzeuge, doch dieser lasse sich gut abgeschirmt in einem Nebenraum unterbringen. Untersuchungen an der Universitätsklinik Mannheim haben jetzt gezeigt, dass die neue Antriebstechnik die Erwartungen erfüllt. "Damit wurde die Grundlage geschaffen für die Entwicklung eines praxistauglichen, robotergestützten Positionierungssystems für Interventionen im MRT", so Horsch. In einem Folgeprojekt will er gemeinsam mit seinem Team die Biege-Aktoren in einen Roboter einbauen, der ebenfalls mit 3D-Drucktechnik gefertigt werden soll. Dies wollen die Wissenschaftler und Ingenieure in einer präklinischen Studie an Nachbildungen von menschlichen Organen und Geweben, wie sie zum Training von Medizinern verwendet werden, testen.
Quelle: Fraunhofer IPA
10.10.2018