© Astrid Eckert / TUM
News • Forschungsprojekt ForNeRo
Sensordaten aus dem OP machen Roboter smarter
Wie können Roboter und Menschen in Zukunft bestmöglich im OP zusammenarbeiten? Das haben Forschende der Technischen Universität München (TUM) und des TUM Klinikums im Forschungsprojekt ForNeRo untersucht.
Mit einem Sensorsystem haben sie dafür die Bewegungen von Chirurginnen und Chirurgen bei Operationen analysiert und Daten aus simulierten OPs mit Assistenzrobotern gesammelt.
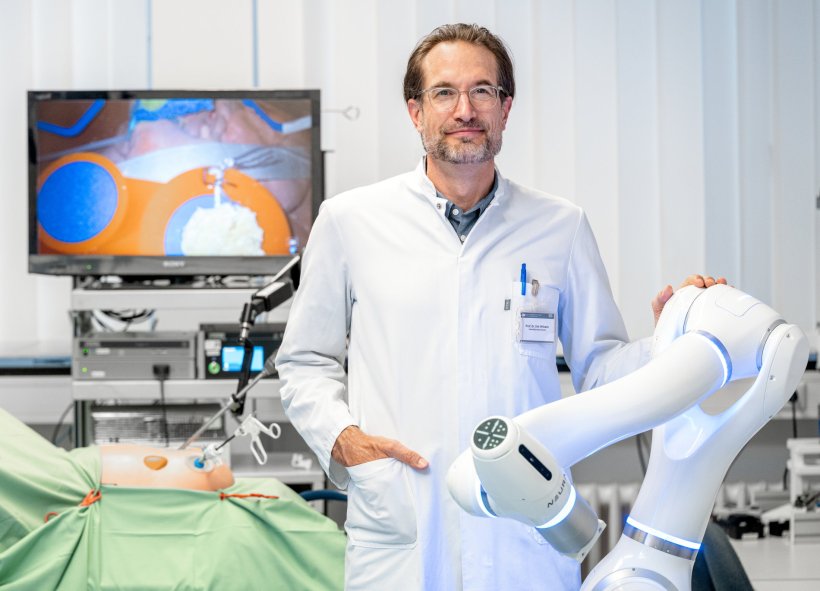
An der Decke des Experimental-OPs im TUM Klinikum in München befinden sich fünf Tiefenkameras. Sie erstellen fünfzehn Mal pro Sekunde ein räumliches, digitales Abbild des OPs – einen digitalen Zwilling. Mitten drin, am OP-Tisch, steht Prof. Dirk Wilhelm, Leiter des Lehrstuhls für medizinische Robotik an der TUM sowie Chirurg und Oberarzt an der Klinik und Poliklinik für Chirurgie am TUM Klinikum. Er trägt einen Anzug mit Markern an den Gelenken und an einem Stirnband, die über ein Infrarot-Trackingsystem mit zehn Kameras lokalisiert werden. Über Mikrofone werden zudem die Gespräche des OP-Personals im Operationssaal aufgezeichnet und präzise lokalisiert. Hinzu kommen physiologische Daten des Personals, um deren Stresslevel zu ermitteln.
Wir können hier untersuchen, wie sich robotische Assistenten nahtlos in den Klinikablauf integrieren lassen
Max Bergholz
Ziel dieser Sensordaten und des digitalen Zwillings des OPs ist es, Prozesse zu verbessern, in Zukunft robotische Assistenzsysteme möglichst effizient und ergonomisch in den OP-Betrieb zu integrieren und damit das Personal zu entlasten. Das in der Forschungsgruppe für minimal-invasive interdisziplinäre therapeutische Intervention (MITI) von Prof. Wilhelm entwickelte Sensorsystem kommt nun deutschlandweit erstmals zum Einsatz, um Daten aus einem realen OP-Umfeld zu sammeln. „Diese Daten können im nächsten Schritt auch dem Einsatz von Robotern im OP zugutekommen“, sagt Prof. Wilhelm. Voraussetzung für die Erhebung der Daten im realen Operationssaal ist das Einverständnis der Patientinnen und Patienten und aller Beteiligten im OP.
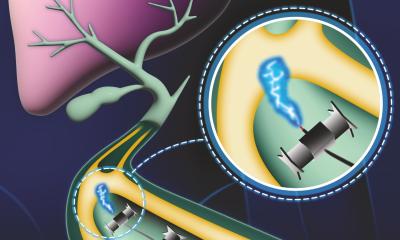
Damit Roboter künftig im OP assistieren können, brauchen sie mehr als Daten. Deshalb geht es im Experimental-OP nicht „nur“ darum, Daten zu sammeln, sondern auch, Roboter-unterstützte Operationen an künstlichen Körpern durchzuführen – also die Zusammenarbeit mit robotischen Assistenten zu testen. Im Rahmen des Forschungsprojektes ForNeRo untersuchten die Forschenden drei typische chirurgische Eingriffe (Operation der Gallenblase, des Leistenbruchs und Teilentfernung des Dickdarms, die sogenannte Sigma-Resektion).
© Astrid Eckert / TUM
Bei den minimal-invasiven Operationen kamen jeweils zwei Roboter zum Einsatz: ein „Solo Assist II“ genannter einarmiger Roboter, dessen Aufgabe es war, ein Endoskop zu halten, sowie MIRO, ein modularer Chirurgieroboter des Deutschen Zentrums für Luft- und Raumfahrt (DLR), den Operierende unter anderem mit Hilfe eines Joysticks bedienen können. Mit ihm steuern sie in einer Testoperation einen winzigen Greifer, verlegen im Falle eines Leistenbruchs ein Kunststoffnetz und setzen die Naht.
Ziel der simulierten OPs ist es, Roboter so zu konfigurieren, dass sie die Chirurgin oder den Chirurgen in Zukunft bei Schlüsselloch-OPs entlasten. Um das zu evaluieren, erfasst Max Bergholz vom Lehrstuhl für Ergonomie der TUM bei den Operationen an künstlichen Körpern und im Sensoren-OP die Körperhaltungen und Bewegungen der Menschen im OP. Zudem befragt er diese zu ihrer körperlichen und physischen Beanspruchung während der einzelnen OP-Phasen. „Chirurginnen und Chirurgen klagen etwa oft über Rückenprobleme durch lange starre Haltungen und die Herausforderung bei bisherigen Systemen, spiegelverkehrt operieren und damit ständig umdenken zu müssen“, sagt der Forscher. Sein erklärtes Ziel ist es, Operateurinnen und Operateuren ihre Arbeit so leicht wie möglich zu machen.
Das Umdenken fällt bei dem Chirurgieroboter weg. Zudem können Chirurginnen und Chirurgen sich nun noch präziser der zu operierenden Stelle nähern, da eine große Bewegung am Joystick nur wenige Millimeter im Körper ausmacht. Gleichzeitig bleiben sie anders als bei dem etablierten Chirurgieroboter DaVinci nahe beim Patienten. Die Forschungen haben gezeigt, dass ein robotischer Assistent einfache Aufgaben wie etwa ein Endoskop halten, im OP übernehmen kann und durch deren Einsatz keine Mehrbelastung entsteht. Für Bergholz ein Erfolg: „Wir können hier untersuchen, wie sich robotische Assistenten nahtlos in den Klinikablauf integrieren lassen.“
In der Zukunft kann sich TUM-Professor Dirk Wilhelm vorstellen, die komplexen Daten aus dem OP auch für Anwendungen der künstlichen Intelligenz zu nutzen. „Daten sind grundlegende Bausteine auch für die Entwicklung von KI-Systemen für den OP. Sie können automatisch erkennen, welche chirurgischen Instrumente genutzt und welche Organe damit operiert werden sollen“, ist Wilhelm überzeugt. So will er zunächst OP- und Planungsprozesse verbessern, bevor KI-Agenten mithelfen zu entscheiden, wann ein robotischer Assistent zum Einsatz kommen sollte.
Quelle: Technische Universität München
20.05.2026