OP
3D-Mikroroboter für minimal-invasive Chirurgie
Wissenschaftler am Max-Planck-Institut für Intelligente Systeme in Stuttgart haben einen Herstellungsprozess für Mikroroboter entwickelt. Diese könnten zukünftig miminal-invasiv schwer zugängliche Körperteile wie das Gehirn, das Rückenmark oder das Auge erreichen.
Ein kleiner Roboter, der mühelos mittels Injektion in den menschlichen Körper gelangt, die gesunden Organe meidet und das Ziel – einen nicht operablen Tumor – findet und direkt behandelt… Klingt dies nicht nach Science-Fiction? Um es Wirklichkeit werden zu lassen, arbeiten immer mehr Forscher an der Vision, wesentliche Bereiche der Medizin und Biotechnologie zu revolutionieren. Das Design und die Herstellung solcher Mikroroboter, sowie auch die Ausstattung mit den entsprechenden Funktionalitäten, stellen jedoch noch große Herausforderungen dar.
Design zum Schaffen bringen
Herkömmliche Methoden ermöglichen nur die Herstellung von relativ einfachen geometrischen Strukturen mit begrenzter Designflexibilität und Funktion. Diese sogenannten „passiven“ Systeme sind auf eine bestimmte Form wie Zylinder oder Kugel beschränkt, und ihre schlichte Struktur erlaubt nur eine eingeschränkte chemische Funktionalität.
Um diese Limitierung zu überwinden, entwickelten Prof. Metin Sitti und seine Mitarbeiter aus der Abteilung „Physische Intelligenz“ am Max-Planck-Institut für Intelligente Systeme in Stuttgart vor kurzem einen neuen zweistufigen Ansatz, der die Mikroroboter mit spezifischen Funktionen auszustatten vermag.
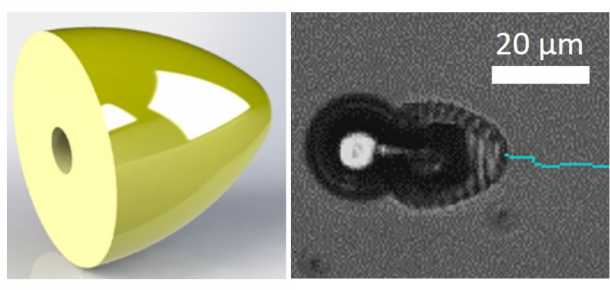
Der erste Schritt, die Kreation des Designs, das zur weiteren Ausarbeitung des Mikroschwimmers befähigt ist, – erfolgt mittels Vernetzung von lichtempfindlichen Polymeren. Dieser Schritt basiert auf der sog. 3D-Laserlithographietechnik und ermöglicht die Herstellung von chemisch homogenen Grundstrukturen mit hoher Anpassungsfähigkeit (siehe Abbildung 1).
Der zweite Schritt stellt die Verknüpfung von Funktionalitäten mit dem erzeugten 3D-Sample an den spezifisch ausgewählten Stellen dar: Die bereits gefertigte Struktur wird mit chemisch kompatiblen kleinen Molekülen modifiziert, die in der Lage sind, neue chemische Gruppen auf die gewünschten Teile des Materials einzuführen (siehe Abbildung 2). Dies erreichen die Wissenschaftler durch selektive, dreidimensionale Ausleuchtung: Ein nativer Polymervorläufer wird entfernt und ein neuer Vorläufer, der die gewünschte chemische Funktionalität trägt, wird eingeführt.
„Die Größenskala solcher Mikroroboter bestimmt stark, welche Werkzeuge verwendet werden können, damit man in der Lage ist, sie mit den bestimmten Fähigkeiten auszustatten. Und das stellt die größte Herausforderung dar: Nicht nur das geeignete Design zu schaffen, sondern auch einen Weg zu finden, dass es auch auf der Mikroskala funktioniert. Unsere Forschung ist die erste Studie, die die Information von der Computergestaltung in die funktionale Struktur auf der Mikroskala übersetzt“, erklärt Dr. Hakan Ceylan, Postdoktorand am Max-Planck-Institut für intelligente Systeme.
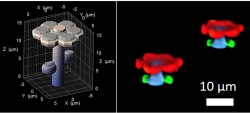
Um das Konzept zu beweisen, bereiteten die Autoren zunächst einen kugelförmigen Mikroschwimmer vor, bei dem der innere Hohlraum mit katalytischen Platin-Nanopartikeln in einem mehrstufigen Prozess selektiv modifiziert wurde. Zur Demonstration der Möglichkeiten und der Wichtigkeit dieser Methode für die Entwicklung von Biomaterialien entwarfen die Forscher an den präzise definierten Positionen eine Mikroblume mit orthogonalen Biotin-, Thiol- und Alkin-Gruppen darauf (siehe Abbildungen 3 und 4).
Größere Intelligenz in kleineren Dimensionen
In der Natur verwenden hirnlose Organismen, wie Schleimpilze, Bakterien und Pflanzen, die physische Intelligenz als Hauptweg der Entscheidungsfindung und Anpassung an komplexe und sich veränderte Umweltbedingungen. In gleicher Weise nutzt die Abteilung „Physische Intelligenz“ des Max-Planck-Instituts für Intelligente Systeme die physikalischen und chemischen Eigenschaften von Materialien, um aktive Aufgaben auf der Mikroskala zu programmieren.
„Unser Hauptziel ist es, neue Methoden der Herstellung von miniaturisierten Materialien zu entwickeln, die sich intelligent in komplexen und instabilen Umgebungen verhalten. Eine wichtige Frage dabei ist, wie solche Intelligenz in kleinen Dimensionen, wo keine konventionellen Rechenfähigkeiten vorhanden sind, erreicht werden kann“, sagt Ceylan. „Unser neu entwickelter Zwei-Stufen-Ansatz ist ein bedeutender Schritt in dieser Richtung“.
Mobile Roboter in Mikrogröße bieten besondere Vorteile, um neuartige Bioengineering-Konzepte zu verfolgen. Im Rahmen dieser Methode möchten die Wissenschaftler mittels Computerunterstützung neue, hochkomplexe Designs für „intelligente“ Mikroschwimmer schaffen. Funktionelle weiche Materialien unter einem Millimeter versprechen unzählige Anwendungen in verschiedenen Bereichen, einschließlich der Biotechnologie, der gezielten Lieferung von Wirksubstanzen durch mobile Mikroroboter der künstlichen Gewebezüchtung usw.
Ein sich selbst antreibender Mikroroboter, so klein wie eine einzelne Körperzelle, und ausgestattet mit einer Wahrnehmungsfunktion, könnte einen bisher beispiellosen direkten Zugang zu tiefen und empfindlichen Körperstellen wie dem Gehirn, dem Rückenmark und dem Auge ermöglichen. Bei minimal-invasiven Operationen eingesetzt, würde ein solcher Mikroschwimmer neue Wege der medizinischen Intervention mit minimaler Gewebeschädigung im Vergleich zu den gebundenen Kathetern und Endoskopen bei herkömmlichen invasiven Operationsverfahren eröffnen.
Obwohl alle diese neuen Möglichkeiten, die ein winziger Roboter mit sich bringt, noch Zukunftsmusik sind, kann dies nach Meinung der Wissenschaftler bald Realität werden. „In naher Zukunft – vermutlich in etwa 10 Jahren – könnte dies enorme Anwendungen in der Gewebezüchtung und in der regenerativen Medizin bieten“, so Ceylan, „Außerdem eröffnet diese Methode große Chancen in der Behandlung von genetischen Erkrankungen durch ein einzelnes Protein auf Zellebene oder durch die Übertragung von Nukleinsäuren. Solche autarken, aktiven Materialien sind besonders attraktiv für die Mikrorobotik und potentielle medizinische Carriersysteme“.
Quelle: Max-Planck-Institut für Intelligente Systeme
10.05.2017