Quelle: Prof. Zbigniew Nawrat, Medizinische Universität Schlesien, Katowice (MUS), Abteilung für Herzchirurgie, Transplantation und endovaskuläre Chirurgie, Medizinische Fakultät mit Abteilung für Zahnmedizin in Zabrze.
Artikel • KI und Roboter
Smarte Chirurgie – von technischer Faszination zur medizinischen Realität
Der Einsatz Künstlicher Intelligenz (KI) im Gesundheitswesen eröffnet eine Welt voller unglaublicher Technologien, die alle Bereiche der Medizin verändern wird. „Wir befinden uns mitten in einer Cyberrevolution in der Medizin“, sagt Professor Konrad Karcz vom Klinikum der LMU München. „So entwickelt sich der Einsatz von KI in der Chirurgie rasant weiter. Intelligente Geräte werden die Chirurgie grundlegend verändern“, ist Prof. Karcz überzeugt.
Bericht: Sascha Keutel
Bereits heute gibt es zahlreiche Einsatzgebiete von Künstlicher Intelligenz im Operationssaal. So werden intelligente Überwachungssysteme eingesetzt, um den aktuellen Stand der Operation zu überwachen. Sie halten fest, ob Schwierigkeiten auftreten, welche Instrumente verwendet werden oder wie viel Blut der Patient während der Operation verliert.
Dieses Jahr werden auch intelligente postoperative Drainagen zum Einsatz kommen, die Pathologien erkennen und den zuständigen Chirurgen automatisch darüber informieren, ob bei einem Patienten etwas Auffälliges gefunden wurde. „Wir werden den Zeitraum zwischen Auffinden der Pathologie und der darauffolgenden Reaktion von zwischen sechs und acht Stunden auf etwa 30 Minuten verkürzen. Damit können wir die Folgen einer Komplikation deutlich verringern und die Chancen für eine schnellere Genesung des Patienten steigern. Der Prototyp ist bereits in unserem Labor getestet“, berichtet Prof. Karcz.
Roboter oder nicht?
Am bekanntesten ist sicherlich die Nutzung von KI in der roboter-assistierten Chirurgie. Die erste Verwendung eines robotergestützten chirurgischen Eingriffs wurde 1985 bekannt, als der Roboterarm PUMA 560 die Nadel für eine Gehirnbiopsie unter CT-Führung platzierte. Seitdem haben die zunehmende Automatisierung und die Fokussierung auf die minimalinvasive Chirurgie für kräftigen Wachstum Fortschritt gesorgt. Intuitive Surgical beispielsweise hat 5000 DaVinci Roboter im weltweiten Einsatz.
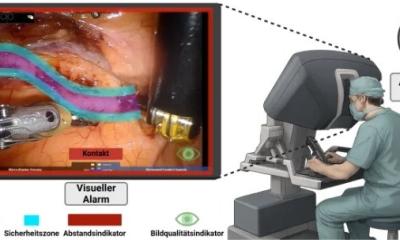
Laut Prof. Karcz sind diese Supportsysteme allerdings keine selbstständigen Roboter. „In unseren Vorstellungen sind Roboter Figuren aus Star Wars. Sie denken und handeln selbstständig. Die heutigen Maschinen führen aber im Operationsaal noch keine autonomen Aktionen aus, sie sind lediglich der verlängerte Arm des Chirurgen“, sagt der Leiter Minimalinvasive Chirurgie der LMU.
Sie fungieren als „Telemanipulatoren“, die Bewegungen des Chirurgen ausführen. Die in sieben Graden definierte Bewegungsfreiheit sorgt dafür, dass Chirurgen jederzeit die vollständige Kontrolle über die robotischen Supportsysteme haben.1

Quelle: Human Xtension
Klein und intelligent
Die Telemanipulatoren, die derzeit im Einsatz sind schwer und voluminös und nehmen sehr viel Platz im Operationssaal ein. Auch deswegen glaubt Prof. Karcz, dass „der nächste Meilenstein der roboterunterstützten Chirurgie oder Intervention in der Miniaturisierung liegt.“
So hat die israelische Firma Human Extension den Arm eines solchen Telemanipulators miniaturisiert und einen bionischen OP-Instrument entwickelt, der ebenfalls die 7 Freiheitsgrade besitzt und präzise Bewegungen direkt am operierten Patienten ermöglicht.
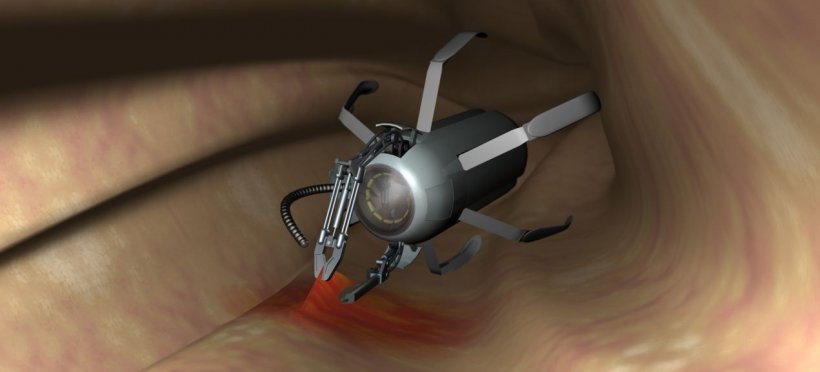
Darüber hinaus wird bereits an Alternativen zur klassischen chirurgischen intraluminalen Intervention geforscht. „Der Mini-Roboter, der dem Patienten zum Schlucken als Kapsel gegeben wird und durch den Magen-Darm-Trakt, wandert, um Proben zu entnehmen oder das pathologische Zielgewebe zu zerstören – dies ist keine Science-Fiction mehr, sondern medizinische Realität in Erprobung“, berichtet Prof. Karcz mit Verweis auf einen von Wissenschaftlern vorgestellten winzigen medizinischen Kapsel-Roboter.
Quelle: Designer: Mats A. Heide, SINTEF, Norwegen
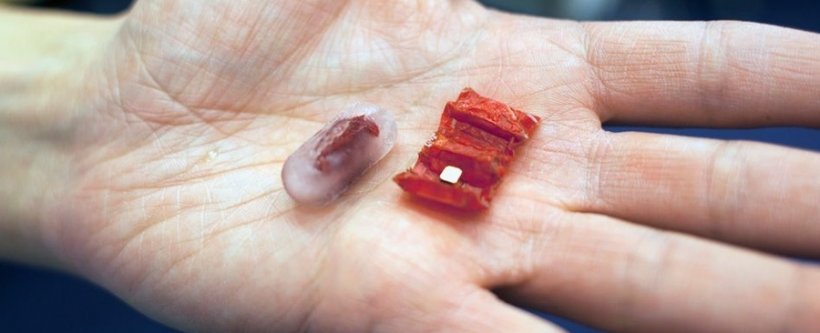
Ein ähnliches Beispiel ist der 2016 von Forschern des Massachusetts Institute of Technology, der University of Sheffield, und des Tokyo Institute of Technology vorgestellte Origami-Roboter, der sich aus einer verschluckten Kapsel entfaltet.2 Dieser Mini-Roboter besteht aus zwei Schichten Strukturmaterial, die ein Material einschließen, das beim Erhitzen schrumpft. Ein Schlitzmuster in der äußeren Schicht bestimmt, wie sich der Roboter auffaltet, wenn sich die mittlere Schicht zusammenzieht.
In der Mitte einer der vorderen Falten befindet sich ein Permanentmagnet, der auf sich ändernde Magnetfelder außerhalb des Körpers reagiert, die die Bewegung des Roboters steuern. Die auf den Roboter ausgeübten Kräfte sind hauptsächlich rotierend. Bei einer schnellen Drehung dreht er sich an Ort und Stelle, bei einer langsameren Drehung dreht er sich um einen seiner festen Füße. Auch kann sich der Roboter selbst mit einer sogenannten "Stick-Slip"-Bewegung antreiben, in einer Art kriechender Fortbewegung wie bei Raupen.
Im Rahmen ihrer Experimente kam der Roboter zum Einsatz, um eine verschluckte Knopfbatterie im Magen eines Kindes zu entfernen. Weitere Einsatzmöglichkeiten sind der Verschluss innerer Wunden ohne Operation. Ein weiteres Beispiel bildet der magnetisch gesteuerten Kleinroboter, welcher durch Wissenschaftler des Max-Planck-Instituts für Intelligente Systeme entwickelt wurde. Dieses System ermöglicht die direkte „Lieferung“ von Medikamenten direkt dorthin, wo sie im Körper gebraucht werden. Prof. Karcz denkt aber noch einen Schritt weiter. „Ich stelle mir vor, dass sich Mini-Roboter zu einer Kolonie oder einem Schwarm zusammenschließen, um autonom Proben zu entnehmen und unterschiedliche Formen der Therapie vorzunehmen.“
Quelle: Melanie Gonick/MIT
Visualisierung
Auch die chirurgische Visualisierung schreitet voran. Dabei unterscheidet Prof. Karcz zwischen analoger, digitaler und hybrider Augmentation.
Die analoge Augmentation beruht auf einer rein chemischen Reaktion: zum Beispiel, Indocyaningrün (ICG) besteht aus kleinen Partikeln, die eine diffuse Fluoreszenz aufweisen, sofern sie durch Nahinfrarotlicht (NIR) (λ = 600 – 900 nm) mit Hilfe eines speziellen Optiksystems angeregt werden. Bei der Fluoreszenz-Bildgebung wird dem Patienten ICG gespritzt. Sie kommt insbesondere in der laparoskopischen Viszeralchirurgie routinemäßig zum Einsatz und bietet dort wertvolle Informationen beispielsweise zur aktuellen Durchblutung.
Unter der digitalen Augmentation vermerkt Professor Karcz den Einsatz der klassischen Augmented Reality. Hierbei werden radiologische Aufnahmen digital bearbeitet, um die gewünschten Organe zu extrahieren. So entsteht ein Bild, das in Wirklichkeit nicht existiert, und das Chirurgen intraoperativ nutzen können, um spezifische Ziele im Körper hervorzuheben. „AR ist sehr hilfreich, wenn wir wissen wollen, wo sich die gesuchten Venen, Gefäße oder Tumoren befinden“, erläutert Prof. Karcz.
Bei der hybriden Augmentation werden Fluoreszenz-Visualisierungen über die digital bearbeiteten Bilder gelegt, so dass der Chirurg die farblich markierten Stellen, beispielsweise einen Tumor, in Echtzeit erkennen kann. „Können Sie sich den zusätzlichen Einsatz von laparoskopischen Lasern vorstellen, die das krebsartige Gewebe sichtbar machen können? Die Technologie wurde als Mikroskop von Forschern des Leibniz-Instituts für Photonische Technologien (Leibniz-IPHT), der Friedrich-Schiller-Universität, des Universitätsklinikums sowie des Fraunhofer-Instituts für Angewandte Optik und Feinmechanik in Jena entwickelt. Wir würden alle diese Informationen gerne gleichzeitig auf einem mehrschichtigen Video-Image des Laparoskop-Monitors erhalten“, träumt Prof. Karcz
Änderung in Curriculum
Zwar werden diese Entwicklungen noch Jahre dauern, aber Professor Karcz ist überzeugt, dass der technologische Fortschritt die derzeitige Rolle des menschlichen Chirurgen verändern wird, wenn sie ihn nicht sogar ferner Zukunft völlig obsolet macht.
Folglich wird sich auch die medizinische Ausbildung wird einen evolutionären Prozess durchlaufen. Nicht nur sieht der Visionär die Verlagerung vom klassischen Frontalunterricht im Hörsaal hin zu einer Ausbildung in einem virtuellen Rahmen voraus. Auch das Curriculum wird sich grundlegend ändern. „Der vielfältige Einsatz von KI und anderen neuen Technologien werden die klassische medizinische Ausbildung gründlich verändern. Selbstständig denkende Roboter werden die Aufgaben autonom ausführen und zukünftige Chirurgen werden die Prozesse kontrollieren. Zukünftig wird ein Schwerpunkt der medizinischen Ausbildung also darauf liegen, die Studenten darin zu schulen, diese Technologien zu verwenden“
1. Designer: Mats A. Heide, SINTEF, Norway. https://www.tandfonline.com/doi/full/10.1080/17434440.2019.1608182, http://vector-project.com/press/index.html.
2. Shuhei, Miyashita, Steven Guitron, Kazuhiro Yoshida, Shuguang Li, Dana D. Damian, and Daniela Rus. "Ingestible, Controllable, and Degradable Origami Robot for Patching Stomach Wounds." 2016 IEEE International Conference on Robotics and Automation (May 2016). https://dspace.mit.edu/handle/1721.1/103071.
Profil:
Prof. Dr. med. Dr. h.c. mult. W. Konrad Karcz PHM ist Bereichsleiter Minimalinvasive Chirurgie an der Klinik für Allgemeine-, Viszeral- und Transplantationschirurgie, Klinikum der LMU München. Karcz sammelte langjährige Erfahrung in der traditionellen, minimalinvasiven und roboterunterstützten Chirurgie sowie im Management Training in Institutionen wie der Schlesischen Medizinischen Universität in Katowice (Polen), der Cornell University in New York (USA), der Albert-Ludwig-Universität in Freiburg, der Universität zu Lübeck, der Harvard Medical School und dem Massachusetts Institute of Technology, Boston (USA). Für seine wissenschaftlichen und didaktischen Leistungen erhielt der Spezialist Karl Storz-Preis 2019 der Deutschen Gesellschaft für Chirurgie sowie vom Präsidenten der Republik Polen die Nominierung zum Professor für Medizin.
Der Artikel wurde zuerst auf Tectales.com veröffentlicht!
16.02.2021