Innovation
Rollstuhlroboter »MeBot« erklimmt Treppen selbstständig
Mit dem MeBot hat das »Human Engineering Research Lab (HERL)« aus Pittsburgh den ersten Rollstuhlroboter entwickelt, der selbstständig Treppen und Bordsteine überwinden kann. Die dafür unterstützende Radarmesstechnik hat das Fraunhofer IPA integriert. Beim 1. Cybathlon der ETH Zürich am 8. Oktober in Kloten, Schweiz, tritt die Innovation gegen andere Systeme an.

Treppen oder Bordsteine stellen für Rollstuhlfahrer derzeit noch ein großes Problem dar. Selbst modernste Anwendungen können solche Hindernisse nicht automatisch überwinden. Stattdessen sind die Patienten auf Hilfe angewiesen, müssen Rampen einsetzen oder viel Schwung holen. »Letzteres ist für die Betroffenen besonders gefährlich, da sie leicht aus dem Rollstuhl fallen, sich verletzen oder von einem Auto erfasst werden können«, kritisiert Rory Cooper, Leiter des HERL.
Auf sechs Rädern erklimmt der Rollstuhl Hindernisse stückweise
Mit dem MeBot will das HERL Abhilfe schaffen. Das weltweit größte Forschungslabor für Rollstühle hat ein Robotersystem entwickelt, das Treppen und Bordsteinkanten automatisch überwindet. Die Basis bildet ein Untersatz aus sechs Rädern, die paarweise angeordnet sind. Die mittlere, größere Radeinheit ist fürs Fahren bestimmt, die Vordere und Hintere dient als Steuerung. Alle drei Radpaare können sich voneinander losgelöst in horizontale und vertikale Richtung bewegen. Sobald der Roboter ein Hindernis erkennt, fährt das erste Radpaar aus und hebt das Fahrzeug an. Anschließend rückt die mittlere Einheit selbstständig nach und hievt den Rollstuhl über die Kante. Zuletzt wird das hintere Radpaar nachgezogen. »Mit diesem Mechanismus kann das System – ähnlich wie eine Raupe – Hindernisse stückweise erklimmen«, informiert Cooper.
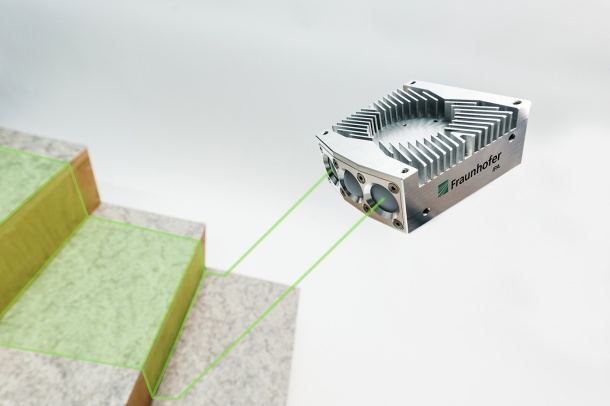
Radarmodul ermöglicht Objekterkennung bei jedem Wetter
Damit MeBot Bordsteine und Treppen sicher überwindet, ist Expertise in der Signalerfassung und -verarbeitung notwendig. Hier waren die Wissenschaftler des Fraunhofer IPA gefragt. Das Team um Bernhard Kleiner, Gruppenleiter »Bewegungserfassung und Sensorfunktion«, hat ein Radarmodul integriert, das Objekte hochgenau erkennt und den Automatismus zum Überwinden aktiviert. Dafür sendet das System Strahlen aus, die die Treppe oder den Bordstein geometrisch vermessen. Mit diesen Daten weiß die Steuerungseinheit genau, wie der Rollstuhl positioniert werden muss, um das Hindernis anzufahren. Steht das Fahrzeug parallel zum Objekt, setzt der Überwindungsautomatismus ein und die Stufe wird erklommen. »Wir haben uns für Radarmesstechnik entschieden, weil sie – im Gegensatz zu Laser oder Infrarot – resistent gegenüber Umwelteinflüssen ist. Regen, Kälte, Nebel oder Feuchtigkeit sind also kein Problem«, erklärt Kleiner. Mit diesen Eigenschaften sind Radarsysteme für viele industrielle Anwendungen einsetzbar. Die IPA-Wissenschaftler haben z. B. schon eine Menschdetektion für Roboter oder Industrie-4.0-Technologien realisiert.
Internationale Forschungskooperation weiter gestärkt
Beim Cybathlon der ETH Zürich muss MeBot nicht nur Treppen steigen. Der anspruchsvolle Parcours bringt sechs Hindernisse mit sich, darunter auch schmale Türen, ein Slalom oder Rampen. »Mit der Rollstuhlkompetenz des HERL und unserer Expertise in der Signalverarbeitung verfügt MeBot über alle Voraussetzungen, die Schikanen zu passieren«, ist Kleiner überzeugt. Bis die Innovation auch in der Praxis eingesetzt werden kann, dauert es allerdings noch einige Jahre. »Unsere Kollegen vom HERL haben einen ersten Prototyp realisiert, den es nun weiter zu testen und schneller zu machen gilt«, so der Wissenschaftler.
Der MeBot ist nicht die einzige Innovation, die das Fraunhofer IPA und das HERL gemeinsam umgesetzt haben. Die beiden Institute verbindet eine langjährige Forschungskooperation in der militärischen und zivilen Rehabilitation. »Die Experten von HERL konzentrieren sich auf die Rollstuhltechnologien, das IPA ist für Antriebs- und Sensorkonzepte zuständig«, so Kleiner. Gemeinsam haben die Partner u.a. einen pneumatisch angetriebenen Rollstuhl umgesetzt.
Quelle: Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
16.09.2016