News • Projekt 'MobDi'
Forscher bringen Desinfektion per Roboter voran
Ein Schlüssel im Kampf gegen Covid-19 besteht darin, die Ansteckungsgefahr zu minimieren. Dieser Herausforderung nimmt sich das Projekt 'Mobile Desinfektion' (MobDi) an, in dem die beteiligten Fraunhofer-Experten neue Hardware- und Softwarelösungen für mobile Serviceroboter entwickeln.
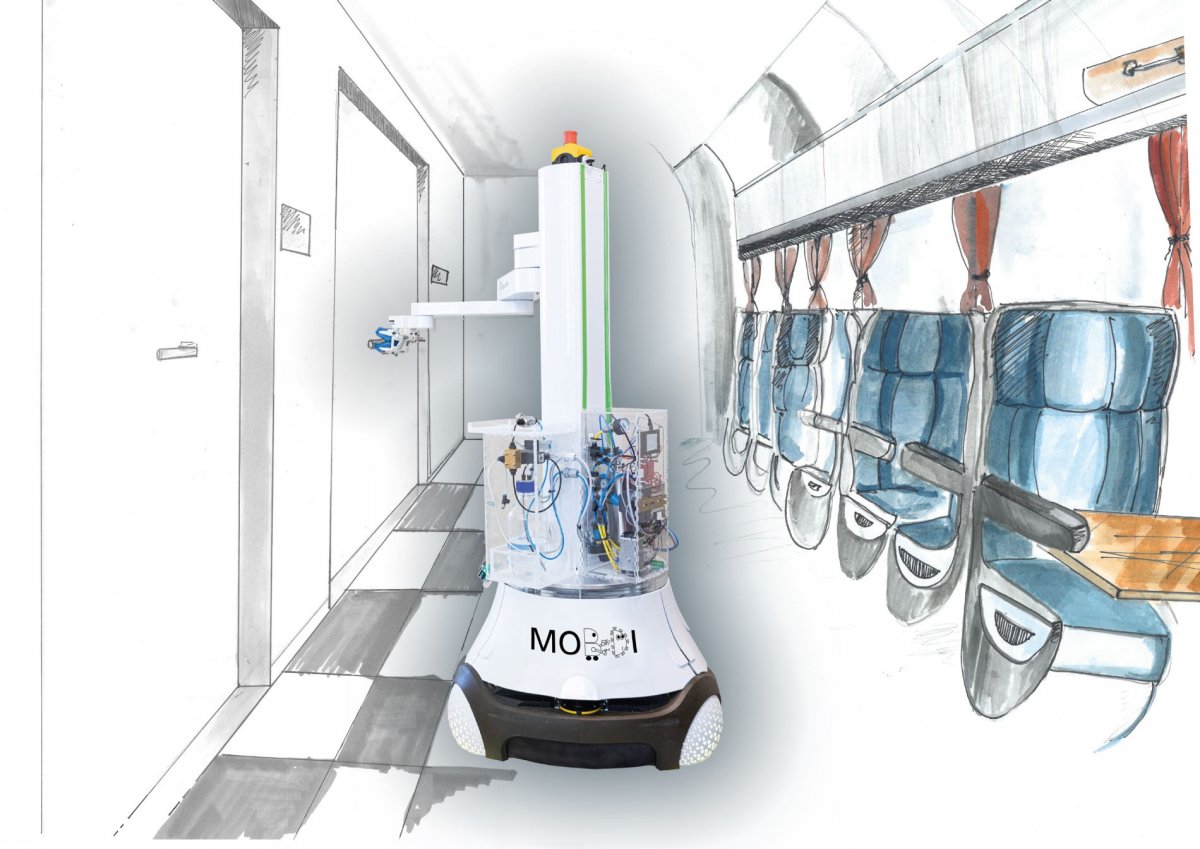
© Fraunhofer IPA/Foto: Rainer Bez und Fraunhofer IMW/Grafik: Stefanie Irrler
Diese sollen einerseits ermöglichen, potenziell kontaminierte Oberflächen in Gebäuden und Verkehrsmitteln bedarfsgerecht und schonend mit einem Roboter zu desinfizieren. Andererseits sollen die Entwicklungen dazu beitragen, den Materialtransport in Kliniken zu automatisieren und damit einer Verschleppung von Keimen durch das Personal entgegenzuwirken.
Für die Desinfektion in Gebäuden und Verkehrsmitteln entwickeln die Projektpartner jeweils spezialisierte Serviceroboter. Die technische Grundlage für die Desinfektion in Gebäuden bildet der 'DeKonBot' des Fraunhofer-Instituts für Produktionstechnik und Automatisierung IPA, den das Institut im letzten Jahr im gleichnamigen Vorgängerprojekt entwickelte. Dessen Werkzeug für die Wischdesinfektion werden die Forscher im Projekt weiter verbessern und die Plattform als Ganzes hinsichtlich einer späteren Serienproduktion optimieren. Der Roboter für die Desinfektion in Verkehrsmitteln entsteht am Fraunhofer-Institut für Fertigungstechnik und Angewandte Materialforschung IFAM. Besonders herausfordernd ist dabei die Entwicklung einer modularen Antriebsunterstützung für das Überwinden von Spalten und Absätzen. Für beide Roboter erstellen die Projektpartner verschiedene Werkzeuge, die durch Wischen, Sprühen, UV- oder Plasmabehandlung desinfizieren. Die Roboter können diese nach Bedarf automatisch wechseln.
Dieser Artikel könnte Sie auch interessieren

Video • Automatisierte Reinigung und Desinfektion
Forscher entwickeln Desinfektions-Roboter gegen COVID-19
Um die Ausbreitung des Coronavirus einzudämmen, hat das Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA in kurzer Zeit den Prototyp eines mobilen Reinigungs- und Desinfektionsroboters entwickelt. Er fährt selbstständig zu potenziell kontaminierten Objekten wie Türgriffen, desinfiziert sie gründlich und ist dabei ressourcenschonend sowie zeiteffizient.
Das Fraunhofer IPA entwickelt zudem einen neuen Transportroboter, der unterschiedliche Handwagen mit sich führen kann, wie sie in Kliniken typischerweise eingesetzt werden. Im Vergleich zu vorhandenen Produkten zeichnet sich die Neuentwicklung durch kleine Abmessungen und ein besonders manövrierfähiges Fahrwerk aus. Das Fraunhofer-Institut für Verfahrenstechnik und Verpackung IVV unterstützt bei der hygienegerechten Gestaltung der verschiedenen Roboter. Zudem entwickelt das Institut Konzepte für deren Selbstreinigung. Diese verhindern, dass die Maschinen selbst zum Kontaminationsrisiko werden.
Dank intelligenter Wahrnehmungsfunktionen werden die Desinfektionsroboter gezielt reinigen können. Dafür kommt ein neuer multimodaler 3D-Sensor des Fraunhofer-Instituts für Angewandte Optik und Feinmechanik IOF zum Einsatz. Mithilfe dieses Sensors erkennen die Roboter während der Inbetriebnahme selbstständig alle Objekte, die sie desinfizieren sollen, und das Material, aus dem diese bestehen. Die Objekterkennung des Fraunhofer IPA sowie die Materialerkennung des Fraunhofer IPM werten die Sensordaten mit Methoden des maschinellen Lernens aus. Damit erreichen sie eine robuste Erkennung, selbst wenn die Objekte in jeder Einsatzumgebung etwas anders aussehen.
Ein mehrschichtiges Umgebungsmodell des Fraunhofer-Instituts für Optronik, Systemtechnik und Bildauswertung IOSB führt alle benötigten Informationen zusammen und ermöglicht den Robotern so, Reinigungsabläufe selbstständig zu planen. Es enthält eine Karte der Umgebung, die Position aller zu reinigenden Objekte sowie deren Material. Nicht immer müssen die Umgebungsdaten manuell eingelernt werden. Auf Basis der Arbeiten von Fraunhofer Italia wird es möglich sein, diese Informationen aus dem sogenannten 'Building Information Modeling' (BIM) automatisch in das Umgebungsmodell zu laden. Das ist eine für viele Gebäude bereits vorhandene digitale Darstellung sämtlicher Bauwerksmerkmale.
Auch im Regelbetrieb soll künftig vor der Desinfektion einzelner Objekte eine Wahrnehmungsfunktion zum Einsatz kommen: Anhand des Verschmutzungsgrads sollen die Roboter die Reinigung optimieren und deren Erfolg verifizieren können. Das Fraunhofer-Institut für Organische Elektronik, Elektronenstrahl- und Plasmatechnik FEP führt im Projekt erste grundlegende Untersuchungen durch, wie diese Verschmutzungen erkannt werden könnten.
Dieser Artikel könnte Sie auch interessieren

Artikel • Oberflächendesinfektion bei Covid-19
SARS-CoV-2: Hartnäckig und langlebig – aber nicht unverwundbar
Oberflächendesinfektion hat sich als eine effektive Präventionsmaßnahme gegen Covid-19 erwiesen, wie Virologen der Ruhr-Universität Bochum (RUB) zeigen konnten. Für eine sinnvolle Desinfektionsstrategie gegen das Coronavirus müssen jedoch einige Faktoren beachtet werden, sagt Prof. Dr. Eike Steinmann.
Für eine gezielte und schonende Reinigung führen die Projektpartner Versuche mit den verschiedenen Reinigungs- und Desinfektionsverfahren auf weit verbreiteten Oberflächentypen wie Edelstahl und Kunststoffen durch. Neben der Analyse der einzelnen Verfahren untersuchen sie auch Kombinationsmöglichkeiten verschiedener Reinigungs- und Desinfektionsverfahren. So könnten die Roboter beispielsweise zunächst einen Türgriff wischen und anschließend UV-Licht einsetzen, um auch die Keime an schwer zugänglichen Stellen zu neutralisieren. Das Fraunhofer-Institut für Lasertechnik ILT wird speziell den kombinierten Einsatz von UV- und Plasmaquellen analysieren.
Für die verschiedenen Verfahren werten die Forscher der Fraunhofer-Institute FEP und IFAM den Desinfektionserfolg sowohl anhand von Verunreinigungen mit Bakterien- als auch mit Virenproben aus. Außerdem untersucht das Fraunhofer-Institut für Schicht- und Oberflächentechnik IST mögliche Materialschädigungen und das Fraunhofer IWS die Entstehung schädlicher Zersetzungsprodukte. So soll eine Methodik entwickelt werden, um für jeden Desinfektionsvorgang abhängig von Material und Verschmutzungsgrad die am besten geeigneten Verfahren auszuwählen.
Die technischen Entwicklungen in 'MobDi' basieren auf vom Fraunhofer-Zentrum für Internationales Management und Wissensökonomie IMW verantworteten Anforderungs-, Nutzen- und Wirtschaftlichkeitsanalysen. Um die Roboter bedarfs- und praxisgerecht anzupassen, entwickelten die Projektpartner gleich zu Projektbeginn gemeinsam mit Anwendern die Szenarien, die mit den Robotern umgesetzt werden sollen, und leiteten daraus die technischen Anforderungen ab. Dazu führten sie zahlreiche Gespräche mit Logistik- und Hygieneexperten in Kliniken nebst Betreibern und Reinigungskräften in Gebäuden und im Personenverkehr. Die Anwender werden zudem in das Projekt eingebunden, um intuitiv bedienbare Nutzerschnittstellen für das Einrichten und den täglichen Betrieb der Roboter zu entwickeln.
Bis zum Abschluss des Projekts im September 2021 sollen die entwickelten Roboter auch praktisch evaluiert werden. Die Projektpartner werden diese zunächst in ihren jeweiligen Labors testen und danach in realistischen Einsatzumgebungen wie in einem öffentlichen Gebäude, im Personenverkehr oder in einer Klinik. Die Ergebnisse gleichen sie dabei mit sogenannten 'Key Performance Indicators' (KPIs) ab. Bereits zu Projektbeginn wurden diese KPIs, also Kriterien für einen erfolgreichen Einsatz der Roboter im entsprechenden Anwendungsfeld, mit potenziellen Nutzern ermittelt.
Weil die Roboter modular gestaltet sind und handelsübliche Schnittstellen nutzen, sind die in 'MobDi' entwickelten Technologien einfach auf andere Maschinen und Roboter übertragbar. Dies unterstützt den schnellen Transfer der Forschungs- und Entwicklungsarbeiten in die Praxis. Interessierte Hersteller können sich gerne an die Projektpartner wenden, wenn sie sich an der Entwicklung beteiligen möchten. Neben dem Transfer einzelner Technologien in bestehende Produkte ist es auch möglich, die entwickelten Roboter als Gesamtsystem in ein neues Produkt zu überführen.
Quelle: Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
12.02.2021