

Scientist designs bio-inspired robotic finger
Most robotic parts used today are rigid, have a limited range of motion and don’t really look lifelike. Inspired by both nature and biology, a scientist from Florida Atlantic University has designed a novel robotic finger that looks and feels like the real thing. In an article recently published in the journal Bioinspiration & Biomimetics, Erik Engeberg, Ph.D., assistant professor in the Department of Ocean and Mechanical Engineering within the College of Engineering and Computer Science at FAU, describes how he has developed and tested this robotic finger using shape memory alloy (SMA), a 3D CAD model of a human finger, a 3D printer, and a unique thermal training technique.
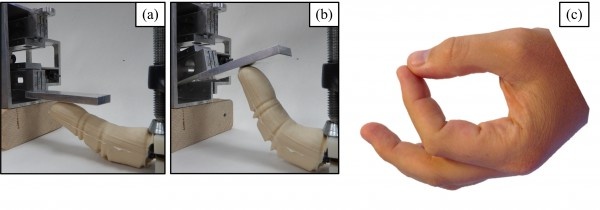
“We have been able to thermomechanically train our robotic finger to mimic the motions of a human finger like flexion and extension,” said Engeberg. “Because of its light weight, dexterity and strength, our robotic design offers tremendous advantages over traditional mechanisms, and could ultimately be adapted for use as a prosthetic device, such as on a prosthetic hand.”
In the study, Engeberg and his team used a resistive heating process called “Joule” heating that involves the passage of electric currents through a conductor that releases heat. Using a 3D CAD model of a human finger, which they downloaded from a website, they were able to create a solid model of the finger. With a 3D printer, they created the inner and outer molds that housed a flexor and extensor actuator and a position sensor. The extensor actuator takes a straight shape when it’s heated, whereas the flexor actuator takes a curved shape when heated. They used SMA plates and a multi-stage casting process to assemble the finger. An electrical chassis was designed to allow electric currents to flow through each SMA actuator. Its U-shaped design directed the electric current to flow the SMAs to an electric power source at the base of the finger.
This new technology used both a heating and then a cooling process to operate the robotic finger. As the actuator cooled, the material relaxed slightly. Results from the study showed a more rapid flexing and extending motion of the finger as well as its ability to recover its trained shape more accurately and more completely, confirming the biomechanical basis of its trained shape.
“Because SMAs require a heating process and cooling process, there are challenges with this technology such as the lengthy amount of time it takes for them to cool and return to their natural shape, even with forced air convection,” said Engeberg. “To overcome this challenge, we explored the idea of using this technology for underwater robotics, because it would naturally provide a rapidly cooling environment.”
Since the initial application of this finger will be used for undersea operations, Engeberg used thermal insulators at the fingertip, which were kept open to facilitate water flow inside the finger. As the finger flexed and extended, water flowed through the inner cavity within each insulator to cool the actuators.
“Because our robotic finger consistently recovered its thermomechanically trained shape better than other similar technologies, our underwater experiments clearly demonstrated that the water cooling component greatly increased the operational speed of the finger,” said Engeberg.
Undersea applications using Engeberg’s new technology could help to address some of the difficulties and challenges humans encounter while working in the ocean depths. The focus of Engeberg’s BioRobotics Laboratory at FAU is investigating robotics and prosthetics, controller design, bioinspiration and biomemetics.
Source: Florida Atlantic University
21.10.2015


