Image source:: MPI-IS
News • From drug delivery to fluid redirection
3D robot navigation could enable multi-site medical procedures
Magnetically actuated soft robots could one day help treat hard-to-reach areas inside the body.
Scientists at the Max Planck Institute for Intelligent Systems (MPI-IS) in Stuttgart, Germany, developed a novel method for deploying several magnetic miniature robots which can easily navigate through a 3D matrix resembling a network of blood vessels. This new method could one day enable the simultaneous treatment of multiple locations in hard-to-reach areas of the human body, which is currently unattainable with conventional tools. This innovative approach could significantly reduce procedure time and increase the effectiveness of minimally invasive therapies.
The research study was published as a featured article in Science Advances.
Our work provides a solution for multi-robot actuation, enhancing applications across various miniature soft robotic device designs in complex environments
Tianlu Wang
Multiple disease sites are common in clinical practice. In the brain for instance, blocked blood vessels can cause strokes, in which the lack of oxygen rapidly damages brain cells. If multiple vessels are blocked, critical areas of the brain may be deprived of blood, leading to severe neurological damage or even death if left untreated. This underscores the urgent need for advanced technologies to treat multi-site conditions.
Magnetically actuated soft robots have significant potential for reaching and treating hard-to-reach areas of the body. They can facilitate targeted drug delivery and support flow diversion. Using multiple robots could allow simultaneous treatment of several locations, saving critical time and enabling localized care.
Scientists at the MPI-IS have looked at this problem. They have developed a robotic system which deploy tiny robots five millimeters in size which deliver drugs or redirect the fluid flow at multiple locations inside a 3D lumen network, which very much resembles a network of real blood vessels. The team from the Physical Intelligence Department shows how multiple robots are independently controlled to navigate tortuous lumens and conduct their functions simultaneously.
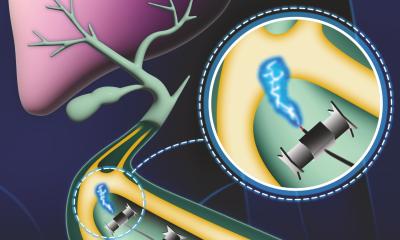
The controlled object is a magnetic robot in the shape of a stent, designed to flexibly adapt to changes in the lumen. To navigate through the network of lumens, the robot needs a strong magnetic force to overcome friction and fluid flow. If the force is insufficient, the robot is unable to move forward. By reducing the magnetic force on unwanted robots while increasing it on the desired robot, one robot can be enabled to move while the others remain stationary. “To our knowledge, this is the first case of independent control of more than five robots in 3D lumens under physiologically relevant conditions,” says Chunxiang Wang, a Ph.D. student in the Physical Intelligence Department at MPI-IS and first author of the paper.
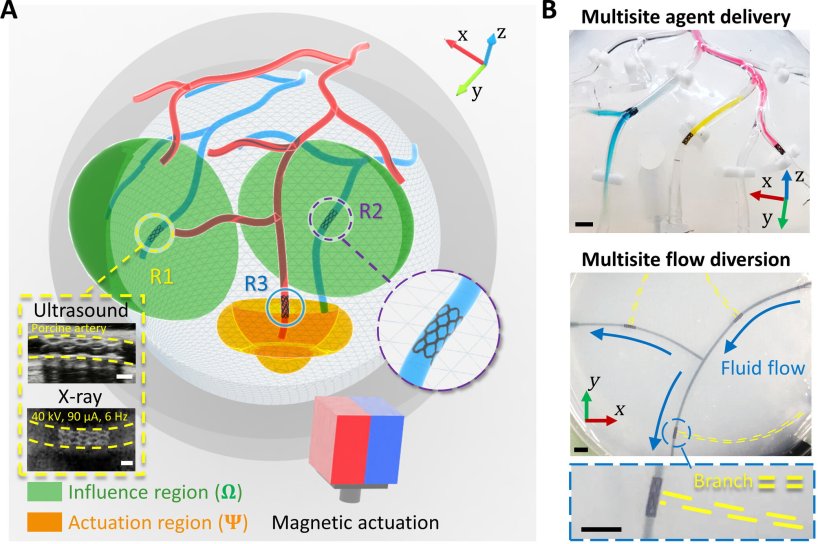
Image source: Wang C, Wang T, Li M, Zhang R, Ugurlu H, Sitti M, Science Advances 2024 (CC BY 4.0)
The robot is controlled by a rotating permanent magnet, with proposed influence and rotation regions to enhance usability. Placing the magnet outside the influence region disables unwanted robots, while positioning it within the actuation region activates the target robot, providing intuitive control for the operator. In practice, the user simply enters the target points and a robotic arm uses a path-planning algorithm to automatically deploy the robots, making the system user-friendly and easy to implement.
“For us it was quite a challenge to control multiple magnetic robots all at once – after all, all magnetic parts are affected by the magnetic field in the same way”, says Tianlu Wang, former postdoctoral researcher in the Physical Intelligence Department at MPI-IS and currently Assistant Professor at the University of Hawaiʻi at Mānoa. “Our work provides a solution for multi-robot actuation, enhancing applications across various miniature soft robotic device designs in complex environments.”
“The proposed system has the potential to open avenues for a wide range of biomedical applications by deploying a group of soft robots equipped with diverse functional modules to reach hard-to-access areas deep inside the human body for targeted therapy”, says Metin Sitti, former Director of the Physical Intelligence Department at MPI-IS and President at Koç University.
Source: Max Planck Institute for Intelligent Systems
11.11.2024